-

YASKAWA TABULA ROBOT MOTOMAN-EPX1250
YASKAWA TABULA ROBOT MOTOMAN-EPX1250, parvus robot pulverisator cum multis articulis verticalibus sex axium, pondus maximum 5 kg et amplitudo maxima 1256 mm. Aptus est armario moderatorio NX100 et praecipue adhibetur ad pulverizandum, tractandum et dispergendum parva opera, ut telephona mobilia, reflectores, et cetera.
-

YASKAWA Automation Pulveris Robot MPX1150
Theautomatum pulverisationis robot MPX1150Idoneum est ad parva opera spargenda. Massam maximam 5 kg et elongationem horizontalem maximam 727 mm ferre potest. Ad manipulationem et spargendum adhiberi potest. Armarium moderatorium miniaturizatum DX200 ad spargendum dedicatum instructum est, et cum ornamentis docendi ordinariis et ornamentis docendi explosionibus resistentibus, quae in locis periculosis adhiberi possunt.
-

Robotum soldadurae YASKAWA MOTOMAN-AR900
Parva materiarobotum soldadurae MOTOMAN-AR900, Articulatio multiplicis verticalis sex axiumTypus, onus maximum 7 kg, elongatio horizontalis maxima 927 mm, aptus armario moderatorio YRC1000, usus includunt soldaduram arcualem, processum lasericum, et manipulationem. Magna stabilitate praeditus et multis aptus est. Hoc genus ambitus laboris, sumptibus parcus, prima electio est multarum societatum.MOTOMAN Yaskawa robot.
-
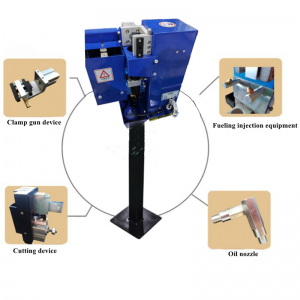
Statio Purgationis Facialis Soldandi
Instrumentum purgationis pro face soldandi
Nota JSR Nomen statio purgationis faces soldandi Exemplar instrumenti JS-2000s Volumen aeris requisitum circiter decem litri per secundum Imperium programmatis Pneumatica Fons aeris compressi Aer siccus sine oleo 6bar Pondus circiter 26kg (sine basi) 1. Designatio purgationis et aspersionis sclopeti in eadem positione mechanismi purgationis et secandi sclopeti,Roboto tantum signo eget ad actiones purgationis sclopeti et injectionis cibustibilis perficiendas. 2. Fac ut partes magni momenti mechanismi filorum secandi sclopeti muniantur.Involucrum altae qualitatis ad vitandum impetum collisionis, aspersionis et pulveris. 1. Sclopetum purga Sparges soldandi ad fistulam adhaerentes pro variis soldandis roboticis efficaciter removere potest. Pro pasta "aspersa" gravi, purgatio etiam bonos eventus praebet. Positio fistulae soldadurae durante processu operis a bloco V-formato ad accuratam positionem praebetur. 2. Asperge Instrumentum liquorem tenuem contra aspersionem in rostro spargere potest ad pelliculam protectivam formandam, quae efficaciter minuit.Adhaesio sparsorum soldadurae et tempus usus ac vitam accessionum prolongat. Ambitus purus ex spatio aspersionis clauso et instrumento collectionis olei residui prodest. 3. Tonsura Instrumentum filum secans opus filum accuratum et summae qualitatis praebet, pilam liquefactam residuam in loco removet.finis fili soldandi, et efficit ut soldandi bonam facultatem arcus initialis habeat. Longa vita utilis et altus gradus automationis. -

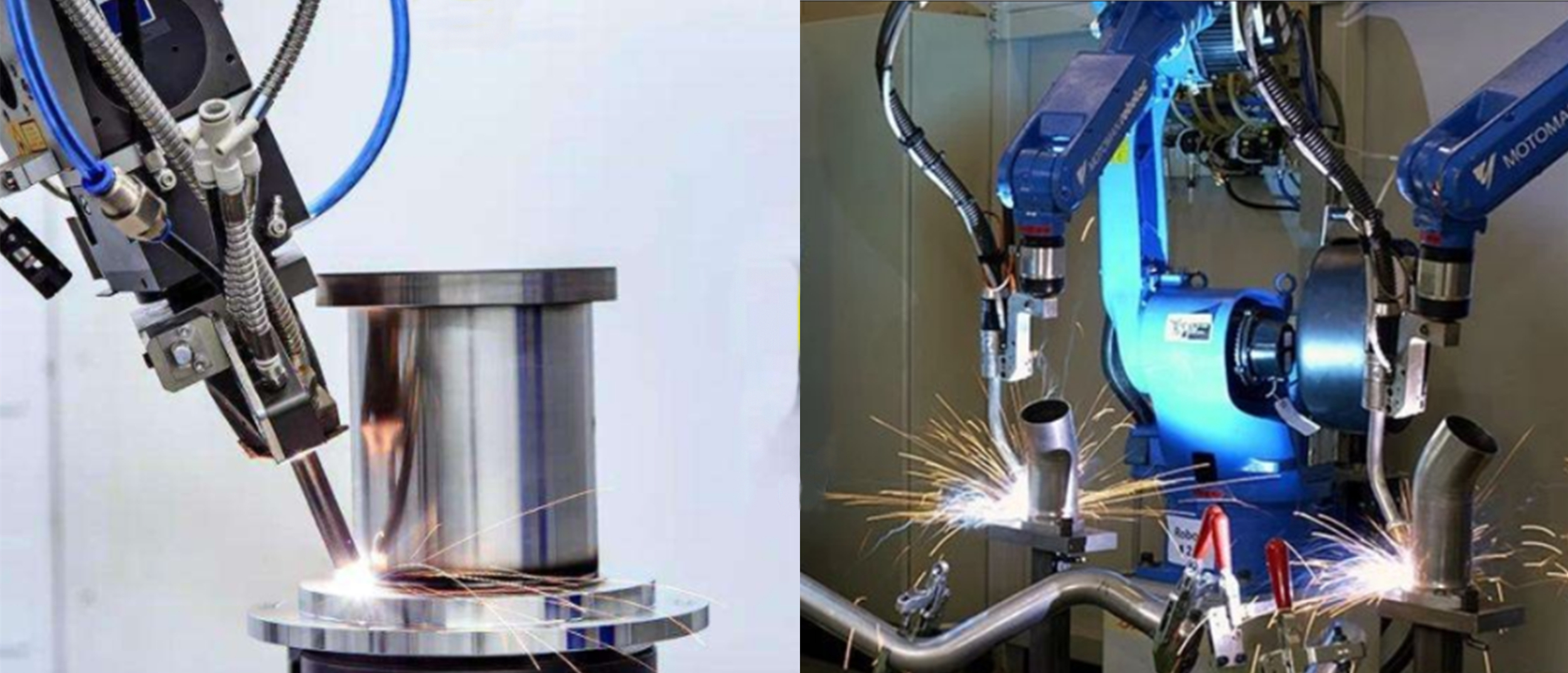
Systema roboticum Yaskawa ad soldaduram laseris faciendam, laseres 1/1.5/2/3 kW
SOLDURA LASER

Structura Systematis Robotici Soldaturae Laser
1. Pars laser (fons laser, caput laser, refrigerator, caput soldadurae, pars filum alendi)
2. Bracchium roboticum Yaskawa
3. Instrumenta auxiliaria et stationes laboris (mensa laboris singularis/duplex/trium stationum, positionator, instrumentum fixum, etc.)Machina automataria ad soldandum laser / Systema roboticum sex axium ad soldandum laser / Solutio systematis integrati robotici ad tractandum laser
Ab industria autocinetica ad industriam aëronauticam – soldadura laserica multis variis applicationum campis apta est. Huius processus commoda gravissima sunt celeritas alta soldadurae et calor parvus.
-

Machina ad ferramentum YASKAWA RD500S
Machina Yaskawa robotica RD500S MOTOWELD ad suendum. Per coniunctionem novae fontis potentiae sudandi digitaliter moderatae et MOTOMAN, imperium sudandi aptius variis modis sudandi obtinetur, qualitatem sudandi altissimam praebens.
-

YASKAWA RD350S
Soldatura altae qualitatis et in laminis tenuibus et mediocriter crassis obtineri potest.
-

Machina Soldandi TIG 400TX4
1. Ad modum soldadurae TIG 4 per mutandum, ad seriem temporis 5 per adaptandum.
2. Tempus prae-fluxus et post-fluxus gasis, valores currentes, frequentia pulsus, cyclus officii et tempus defluxionis aptari possunt cum "Crater On" selectum est.
3. Frequentiae impulsuum accommodatio est 0.1-500Hz.
-

Robot automaticus ad soldaduram YASKAWA AR1440
Automaticum robotum soldadurae AR1440, magna praecisione, magna celeritate, functione aspersionis humilis, operatione continua 24 horas, apta ad soldandum chalybem carbonicum, chalybem inoxidabilem, laminam galvanizatam, mixturam aluminii, aliasque materias, late adhibita in variis partibus autocineticis, supellectili metallica, apparatu exercitationis, machinis ingeniariis, aliisque proiectis soldandi.
-

Robot Yaskawa ad arcum soldandum AR2010
TheRobot Yaskawa ad arcum soldandum AR2010, cum brachio 2010 mm latitudine, pondus 12 kg ferre potest, quod celeritatem roboti, libertatem motus et qualitatem soldadurae auget! Rationes principales institutionis huius roboti arcus soldadurae sunt: typus pavimenti, typus inversus, typus parieti affixus, et typus inclinatus, quae necessitatibus usorum quam maxime satisfacere possunt.
-

Yaskawa macula welding robot MOTOMAN-SP165
TheYaskawa macula welding robot MOTOMAN-SP165Automatum multifunctionale est, tormentis sudandis parvis et mediis respondens. Typus est sex axium verticalis, multiarticulationis, cum onere maximo 165 kg et extensione maxima 2702 mm. Aptus est armariis moderatoriis YRC1000 et ad sudandas punctuales et transportationem adhibetur.
-

Automatum Yaskawa ad Puncturas Soldandas SP210
TheAutomatum Yaskawa ad Punctum SoldandumStatio laborisSP210Onus maximum 210 kg et amplitudinem maximam 2702 mm habet. Usus eius includunt soldaduram punctatam et manipulationem. Idoneus est industriis electricis, machinalibus, et autocineticis. Campus maxime adhibitus est officina automatica compositionis carrorum autocineticorum.

www.sh-jsr.com
Producta Calida - Index situsAutomatum Soldandi, Yaskawa Pictrix Automata, Automaticum Pictorium Robotum, Automatum Palletizatorium, Automatum Yaskawa ad Punctum Soldandum, Palletizator Automaticus,
Accipe schedam datorum vel pretium gratuitum
Nuntium tuum hic scribe et nobis mitte.