Automata industrialia flexibilitatem et praecisionem altissimam, requisita humilia in ambitu laboris, operationem sustinibilem, qualitatem producti stabilem, et efficientiam magnam praebent. Officina robota Yaskawa sex axium tractantium GP12 introduxit ut systema onerandi et exonerandi lineam automaticam congregationis constitueret.
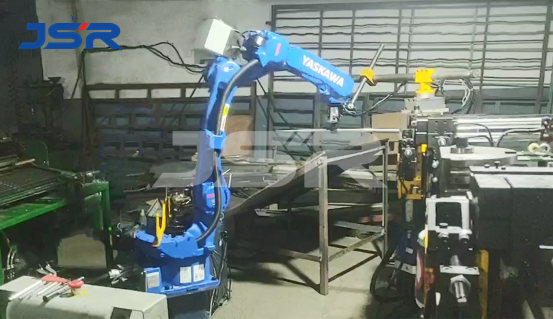
Haec societas est quae partibus birotarum agit, et GP12 in manubriis birotarum onerandis et exonerandis operatur. Ei necesse est tubum ferreum a puncto A ad curvatorem tuborum movere. Post processum, curvator tuborum eum extrahit et ad punctum B movet. Accurate sumi debet.
Implementatio Programmatis:
1. Ingeniarius consilium delineationis et constructionis rationabilem secundum veram condicionem laboris in situ emptoris faciet.
2. Fila interactionis signorum secundum signa ab apparatu externo in agro et a robot requisita perage.
3. Programma logicum roboti programmavi et trajectoriam roboti docui.
4. Cursus probationum programmatis requisitis moderationis et necessitatibus productionis satisfaciunt.
5. Installationem in situ et emendationem errorum perfeci, et clientibus institutionem de usu instrumentorum praebui.
6. Post paucos dies laboris, apparatus in situ positus nullam habet ratem defectus, quae productionem continuam viginti quattuor horarum officinae sustinere potest.
Automata tractantia laborem operariorum minuit, productionem et efficientiam operis auget, salutem personalem operariorum curat, et automationem, intelligentiam et humanizationem efficit. Jiesheng parata est solutiones automationis roboticae industrialis ad singulas necessitates aptatas pro singulis clientibus praebere.

Tempus publicationis: IX Novembris MMXXII
